Por Fabio Ioveni Lavandoscki, Diego Lapolli Bressan, Lucas P. G. Fernandes e Douglas Bellomo Cavalcante
Introdução
No artigo anterior “Monitoramento estrutural de obras civis utilizando a plataforma Arduino e sensores de baixo custo – Introdução” foram apresentados aspectos históricos relacionados à monitoração de estruturas civis e uma introdução superficial ao tema. A seguir serão apresentados os diversos equipamentos que são utilizados para realizar essa monitoração.
Equipamentos de monitoração
Na monitoração de estruturas, há inúmeras atividades necessárias para o funcionamento satisfatório do sistema. As tarefas iniciais são as medições realizadas pelos sensores, mas seguem diversas outras que lhe são associadas, como, por exemplo, o tratamento e conversão de dados, além da manipulação final das informações coletadas. Para tanto, são necessários diversos equipamentos, que diferem consideravelmente em sua natureza, função e custo. Na Figura 1, mostra-se um esquema geral das partes básicas constituintes de um sistema de monitoração de estruturas e, em seguida, cada parte é discutida, com especial destaque aos equipamentos a elas relacionados.

Figura 1 – Fluxograma dos equipamentos de monitoramento estrutural.
Rede de sensores
Constantemente, no monitoramento estrutural, empregam-se as palavras sensores e transdutores como sinônimos, mas há uma distinção. Os sensores são instrumentos que têm alguma de suas características alteradas quando do acontecimento de algum fenômeno, sem que, todavia, haja obrigatoriedade da interpretação desse evento.
Os transdutores, por sua vez, são capazes de converter uma alteração geral, comumente uma grandeza física ou química, em dados interpretáveis, como sinais elétricos em forma de tensão ou corrente. Assim, entende-se que os transdutores sempre contêm sensores, mas conseguem converter os dados de entrada em informações mais palpáveis para interpretação.
Para fins de simplificação, neste relatório técnico as palavras sensores e transdutores, a despeito da sutil diferença entre as duas, serão utilizados como equivalentes.
Os diversos sensores utilizados no monitoramento estrutural são capazes de medir as mais variadas grandezas de interesse da engenharia civil, como rotações angulares (inclinação das estruturas), vibrações, deformações, tensões, temperatura, umidade, velocidade do vento, etc.
Aquisição de dados
Após medição das grandezas de interesse pelos sensores, os dados, na forma de sinais elétricos, ainda não podem ser prontamente armazenados e tratados, seja pelo fato de sua qualidade ser potencialmente baixa, pela possibilidade de haver ruídos presentes na medição, como pelo fato de ter natureza incompatível com os sistemas de computadores que vão fazer a análise de dados (os computadores requerem informações na forma de sinais digitais e não elétricos). Como consequência, é necessário um sistema intermediário que seja capaz de receber, condicionar e tratar os dados de modo a possibilitar sua recepção pelo sistema de análise; quem executa essas tarefas é o chamado sistema de aquisição de dados, que tem basicamente três partes constituintes, explicadas a seguir.
- Condicionador de sinais: executa tarefas como amplificação e filtração dos sinais, além isolar os componentes do sistema de modo a protegê-los em situações excepcionais. A amplificação de sinais é um processo que busca ajustá-los à faixa para a qual está configurado o conversor A/D (conversor de sinais analógicos para digitais). A filtração dos sinais tem como função diminuir os ruídos presentes na medição, que poderiam acarretar perda significativa da qualidade dos dados de saída;
- Conversor de sinais analógicos para digitais (A/D): promove a adaptação necessária para que as informações coletadas pelos sensores (analógicos) possam ser interpretadas pelo programa de aquisição de dados;
- Programa de aquisição: os programas de aquisição são softwares que permitem o armazenamento dos dados tratados pelo conversor A/D de forma que possam chegar à etapa de análise de dados.
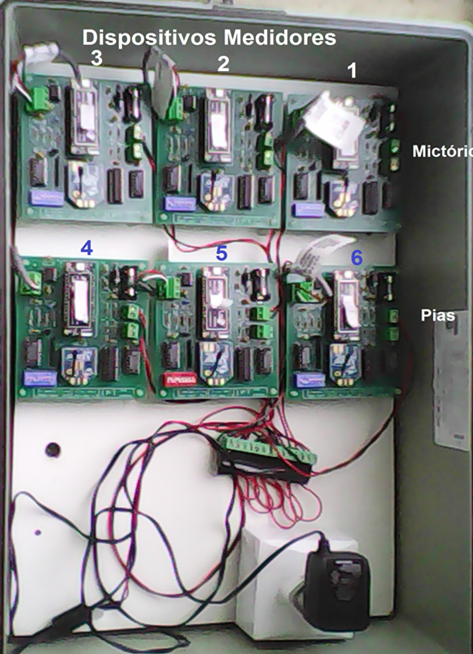
Os sistemas de aquisição de dados são encontrados, basicamente, em duas versões bem distintas. O tipo mais tradicional é baseado nas chamadas placas de aquisição, que em geral demandam um computador auxiliar para completar as atividades necessárias, além de demandarem grande quantidade de cabos, o que acaba gerando dificuldades para o sistema, como, por exemplo, a possibilidade de furto dessas peças. Um exemplo dessa versão é mostrado na Figura 2.

Figura 2 – Sistema de aquisição de dados com placa de aquisição.
Outro tipo de sistema de aquisição de dados é baseado em unidades autônomas, chamadas data loggers, que funcionam para menos sensores, mas que são protegidas muito mais facilmente, além de demandarem menos energia para seu funcionamento. Um exemplo dessa solução é mostrado na Figura 3.

Figura 3 – Sistema de aquisição de dados em data logger.
Tratamento de dados
A etapa de tratamento de dados se refere à parte em que se tomam decisões importantes de maneira a transformar os dados brutos vindos das medições em informações mais interessantes ao suporte da tomada de decisões. Atividades básicas dessa etapa envolvem, principalmente, processos de cunho estatístico, que podem prover maior significado a tudo aquilo que foi coletado, além de facilitar análise dos dados.
Avaliação e gestão de resultados
No estágio de avaliação e gestão de resultados, a partir do objetivo a que foi destinada a atividade de monitoração, executam-se as tarefas necessárias para se chegar a um resultado. Há uma infinidade de tipos de análise e tratamento dos dados coletados em monitoramento estrutural, tão mais complexa e sofisticada quanto for necessário.
Sensores
Na monitoração de estruturas, os sensores são os responsáveis por aferir as grandezas de interesse, que são comumente rotação angular, vibrações, deformações, deslocamentos, tensões, umidade, temperaturas e velocidade do vento. Há diversos tipos de sensores que utilizam os mais diferentes métodos de medição. A seguir discutem-se os princípios de medição mais importantes.
Mecânicos
Os sensores mecânicos foram os precursores no campo de medição em engenharia estrutural e, como o próprio nome sugere, não utilizam, para aferição, mais do que a deslocamentos de pequenas estruturas para atingir seus objetivos. Um exemplo é o chamado tensômetro de Huggenberger, mostrado na Figura 4.

Figura 4 – Tensômetro de Huggenberger.
Elétricos
Os sensores elétricos, seguramente os mais utilizados não só em engenharia civil, mas na maioria das aferições em engenharia, desenvolveram-se ao longo do século XX. Estudados desde meados do século XIX, em tempos de revolução industrial, esses sensores têm como princípio geral de funcionamento as relações existentes entre as grandezas que devem ser medidas com grandezas elétricas, que podem ser facilmente aferidas por meio de circuitos elétricos, através de voltímetros e amperímetros. Exemplo clássico é o strain gage, que usa a primeira lei de Ohm, que relaciona a resistência de um fio a seu comprimento, para medição das deformações, nada mais que a variação relativa do comprimento. A equação característica que representa essa lei é: R = (ρ * l) ÷ A , em que R é a resistência do fio, ρ a resistividade, l o comprimento e A a área.
Apesar de todos os sensores elétricos, para medição das grandezas de interesse, utilizarem relação dessas últimas com grandezas elétricas, ressalta-se que há enorme quantidade de diferentes tipos de sensores, na medida em que mudam essas relações algébricas. O exemplo acima do strain gauge configura os sensores elétricos que tiram proveito da relação da grandeza de interesse (no caso, comprimento) com a resistência elétrica, mas há sensores que utilizam relação com outras características da eletrônica, como capacidade de condensadores, no caso dos transdutores capacitivos, e indutância mútua de bobinas, no caso dos transdutores indutivos.
Sensores Inerciais
De [1] Torres (2015), temos que: em 1687, Isaac Newton enunciou em sua fantástica obra Philosophiae Naturalis Principia Mathematica que todo corpo tende a permanecer no estado de repouso ou de movimento retilíneo uniforme, a menos que haja sobre ele forças externas que o obrigue a mudar este estado. Essa lei, também conhecida como Princípio da Inércia, é um dos conceitos mais básicos da mecânica clássica. Os sensores inerciais são capazes de detectar padrões de movimento de sistemas dinâmicos que obedecem a essa lei.
Sensores Inerciais: a relação entre Newton e os sistemas embarcados
A inércia é uma propriedade física da matéria que foi estudada e formulada inicialmente por Galileu e, posteriormente, provada por Newton. Esse princípio, que à primeira vista parece ser óbvio, tornou-se a base para a tão conhecida 1ª Lei de Newton e foi um dos responsáveis por provocar este cientista a desenvolver um ramo da matemática específico para explicação de suas teorias: nada mais, nada menos que o cálculo diferencial e integral. Graças ao sacrifício de Newton, provavelmente a custo de anos e anos de isolamento social, uma base sólida foi desenvolvida para formulação de sistemas dinâmicos clássicos.
São chamados de sensores inerciais aqueles que têm por objetivo perceber os efeitos da ação de forças que provoquem uma mudança do estado inercial de sistemas sobre os quais estas forças são exercidas, sensores estes baseados na tecnologia MEMS (Microelectromechanical Systems). Devido ao grande número de aplicações, estes sensores se tornaram um dos sistemas microeletromecânicos mais populares. Estes dispositivos são considerados a maior revolução tecnológica desde a microeletrônica baseada em silício.
Sensores inerciais são (Figura 5) capazes de monitorar variações de velocidade e aceleração, linear ou angular, direta ou indiretamente, através da conversão de forças inerciais em alguma mudança física conhecida que possa ser capturada por um transdutor correspondente e convertida em um sinal elétrico. Este sinal elétrico é submetido a processos de filtragem linear e não linear a fim de se criar uma estimativa do sinal de entrada. A saída final representará um valor calibrado da aceleração ou velocidade medida.

Figura 5 – Prototipagem de dispositivos MEMS Inerciais.
Conforme apresentado na Figura 6 em um único circuito integrado encontramos estruturas mecânicas microusinadas formando os transdutores mecânicos, responsáveis por realizar a tarefa de sensoriamento e, a microeletrônica, competente o suficiente para nos fornecer sinais elétricos analógicos correspondentes às forças as quais o sensor foi submetido. Pode-se recorrer a dispositivos que forneçam sinais já digitalizados, filtrados digitalmente, processados e, até aos que armazenem leituras anteriores em memória, tudo de forma autônoma, sem a interferência da CPU principal.
Se o sensor fornecer uma saída bruta, sem qualquer tratamento, ou então uma saída processada, pronta para ser utilizada, dependerá das características do dispositivo escolhido e, claro, do valor investido.

Figura 6 – Visão sistêmica de um sensor inercial.
As microestruturas transformam os fenômenos físicos aferidos em um sinal elétrico proporcional. Esses transdutores estão sujeitos a interações com o encapsulamento do circuito integrado, normalmente causando a transferência de calor e tensões mecânicas para o encapsulamento. A recíproca também é verdadeira, de forma que esses fatores do ambiente podem ser transferidos para os transdutores através do encapsulamento, mudando seu comportamento.
A microeletrônica, normalmente, consiste de um estágio de entrada que amplifica o sinal elétrico recebido do transdutor. A eletrônica também deve gerar sinais de controle necessários para configuração e ajuste do funcionamento do sensor. Na prática, a fronteira entre a microeletrônica e os transdutores não é muito bem definida e, frequentemente, estes dois formam um bloco indivisível, onde o estágio de entrada fornece a polarização e excitação necessárias para o transdutor, ou partes da microeletrônica podem atuar como componentes do transdutor.
A categoria de sensores inerciais baseados em MEMS é representada por dois tipos de dispositivos:
- Acelerômetros:capazes de aferir a aceleração linear na direção de um eixo referencial. Aceleração é a taxa de variação da velocidade no tempo, representada em m/s2 (metro por segundo ao quadrado) no Sistema Internacional de Unidades;
- Giroscópios:capazes de medir a velocidade angular em torno de um eixo de referência. A velocidade angular é uma grandeza que representa a taxa de variação da posição angular no tempo, cuja unidade de medida no Sistema Internacional é o rad/s (radiano por segundo).
Acelerações e velocidades angulares são sinais vetoriais, possuindo módulo, direção e sentido. Se somente um componente do vetor é medido, o sensor é caracterizado com 1D ou de um eixo. Se dois ou os três componentes do vetor são capturados, o sensor é caracterizado como um acelerômetro 2D ou 3D, respectivamente. O mesmo vale para os giroscópios.
Acelerômetros
Sensores de aceleração, mais conhecidos como acelerômetros, são o carro chefe dos sensores inerciais, já que são os mais utilizados e conhecidos. O desenvolvimento desses dispositivos, normalmente, é acompanhado da preocupação em se conseguir componentes menores e mais baratos, com sensoriamento tridimensional e processamento digital de sinais embarcado no próprio chip.
Há uma infinidade de acelerômetros disponíveis no mercado e, atualmente, eles são empregados em grande escala em produtos de grande produção, como automóveis, consoles de videogame, smartphones, monitores de atividade física, etc. Nessas aplicações, sensores menores e mais baratos são preferidos em detrimento a acelerômetros de alto desempenho.
A Figura 7 exemplifica o conceito de funcionamento de um acelerômetro de dois eixos.

Figura 7 – Estrutura de um acelerômetro de dois eixos.
Basicamente, uma massa de prova de silício é suspensa e suportada por molas, também de silício, conferindo a esta massa uma mobilidade conhecida. O acelerômetro, por estar fixado ao sistema a ser medido, sofrerá a ação das mesmas forças impostas a este sistema. Uma variação de velocidade provocará, pelo princípio da inércia, uma alteração entre a distância dos eletrodos fixos e dos eletrodos móveis ligados à massa de prova. Em repouso, as capacitâncias C1 e C2 são iguais. Sob o efeito da aceleração, C1 e C2 variarão dependendo do sentido e intensidade das forças que provoquem essa mudança de estado inercial. Daí em diante, a microeletrônica assume a tarefa de tratar os sinais elétricos provenientes destas variações de capacitância.
Em aplicações que requerem maior resolução e estabilidade, como detecção de terremotos, sistemas de navegação inercial e obtenção de perfis de reflexão sísmica, o mais indicado é o uso de acelerômetros baseados em estruturas vibrantes.
Giroscópios
Giroscópios tornaram possível que o homem pisasse na Lua. Com apenas isso em vista, já podemos ter uma ideia da importância desse componente para a humanidade. É graças a ele, também, que aviões conseguem sobrevoar em regiões de visibilidade zero com segurança, dentre inúmeras aplicações. Enfim, giroscópios são dispositivos fundamentais para orientação de espaçonaves.
Estruturalmente, um giroscópio é similar a um acelerômetro, possuindo, também, uma massa de prova suportada por molas de silício. A principal diferença é que a velocidade angular é obtida medindo-se a força Coriolis exercida na massa vibrante, ou seja, o movimento do corpo de prova deve possuir, pelo menos, dois graus de liberdade.
Observe a estrutura de um giroscópio baseado em MEMS, capaz de medir a velocidade angular em torno de somente um eixo (Figura 8).

Figura 8 – Estrutura de um giroscópio de um eixo.
Sistema de Posicionamento Global (GPS)
O sistema GPS é um dos diversos mecanismos de posicionamento por satélites disponíveis atualmente. Seu uso para monitoração estrutural é possível e cada vez mais comum, sobretudo no que se refere à medição de deslocamentos, sendo o principal limitante o custo de suas operações, principalmente o preço dos equipamentos envolvidos. Sua aplicação é principalmente vista em obras de grande porte, de alto risco, que justificam os altos custos, como em barragens, caso da Figura 9.

Figura 9 – Estação de GPS no topo de barragem.
Fibra óptica
O princípio básico de seu funcionamento é o fenômeno óptico chamado de reflexão total. Quando a luz passa de um meio a outro, havendo mudança de sua velocidade, ocorre a refração luminosa, em que a mudança do ângulo de incidência obedece à Lei de Snell-Descartes, exemplificada na Figura 10.

Figura 10 – Lei de Snell-Descartes.
Existem diversos tipos de sistemas de monitoração de estruturais que podem ser aventados com o uso de fibra ótica, cada um tendo um princípio de funcionamento diferente, mas todos têm um princípio geral comum. Se os sensores elétricos permitem a medição de grandezas de engenharia civil a partir da aferição direta de grandezas elétricas, como corrente ou tensão, os sensores em fibra ótica permitem a medição de grandezas de interesse também a partir da aferição direta de grandezas de natureza óptica, como comprimento de onda, ou frequência.
Conclusão
Este artigo apresentou alguns equipamentos e sensores frequentemente utilizados para monitoramento de estruturas civis. .
.
Monitoramento estrutural de obras civis utilizando a plataforma Arduino e sensores de baixo custo
Outros artigos da série
- Introdução
- Equipamentos de Monitoração – (Este artigo)
- Normas e parâmetros de vibração
- Prototipagem rápida
- Arranjos experimentais e resultados
Referências
[1] TORRES, H. Sensores Inerciais partes 1 e 2. 2015.
Crédito para a Figura 2: HBM Inc.
Crédito para a Figura 4: Gómez, L. A. Instrumentação de Ensaios. Apostila. Universidade Federal de Santa Catarina. Florianópolis, SC. 2p.
Crédito para a Figuras 5, 6, 7 e 8 : TORRES, H. Sensores Inerciais partes 1 e 2. 2015.
Crédito para a Figura 9: HILLMAN, B. A.; RUTLEDGE, D. R.; MEYERHOLTZ, S. Z.; BALDWIN, C. S. Using Global Positioning Systems To Monitor Movement in Dams, 2016.
Crédito para a Figura 10: SILVA, J. S. J. Lei de Snell-Descartes, 2018.
![]()
Esta obra, “Monitoramento estrutural de obras civis utilizando a plataforma Arduino e sensores de baixo custo – Equipamentos de monitoração“, de Fabio Ioveni Lavandoscky, Diego Lapolli Bressan,Lucas P. G. Fernandes e Douglas Bellomo Cavalcante está sob a licença Creative Commons Atribuição-NãoComercial-CompartilhaIgual 4.0 Internacional.